Operating System Concepts Essentials Notes
- 16 minsHere’s a small summary i made of the Operating System Concepts Essentials book
I hope it helps
(CPU), the memory, and the input/output (I/O) devices are basic computing resources
maximize resource utilization— to assure that all available resources are used efficiently and that no individual user takes more than his fair share
Each device controller is in charge of a specific type of device (for example, disk drives, audio devices, or video displays)
Any OS consists of : Kernel + system programs[daemons]
how do software and hardware make events/interrupts/traps/break points? In software -> sys call In hardware -> interrupt signal to the CPU using the bus
When an interrupt occurs, each interrupt has a specific number in a table of interrupt type, function pointers and device number. the CPU checks that table before executing the function associated with the interrupt
RAM commonly is implemented in a semiconductor technology called dynamic random-access memory (DRAM)
DRAM: this memory must be constantly refreshed (thousands of times per second) to retain its contents.
SRAM: used in cpu caches. Faster , more expensive, uses more power
electrically erasable programmable read-only memory, EEPROM , it can be changed. in smartphones it stores their factory-installed Programs
Three types of ROM:
- Programmable ROM (PROM)
- Erasable programmable ROM (EPROM)
- Electrically erasable programmable ROM (EEPROM)
Two types of partitions:
• Primary partition (used for OS files)
• Extended partition
Because ROM cannot be changed, only static programs, such as the bootstrap program are stored there.
Load -> loads from RAM to registers Store -> from regs to ram
The CPU immediately executes from RAM storage order according to speed and cost
Volatile storage loses its content when the power is removed like RAM
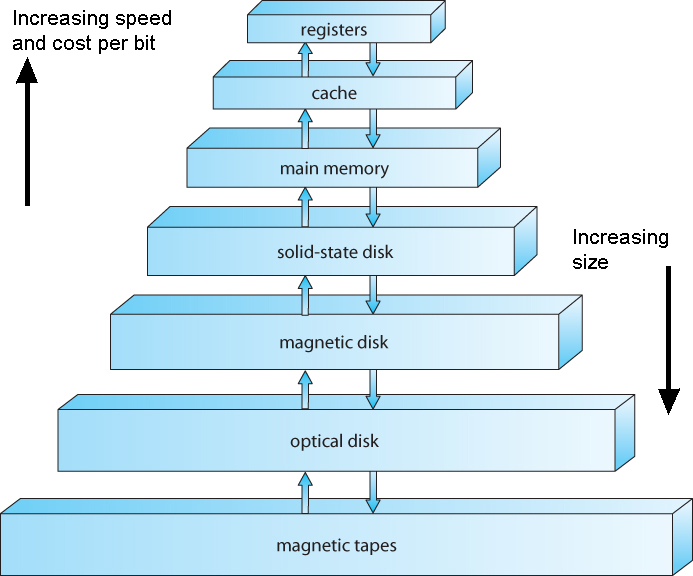
from SSD downwards -> non volatile At the beginning of its usage, SSD suffered from a major disadvantage, which was the limited number of write cycles it had.
Typically, operating systems have a device driver for each device controller. [one for the GRAPHICS CARD , KEYBOARD ETC..]
disk i/o uses direct memory access (DMA) , which means that the device controller transfers an entire block of data directly to or from its own buffer storage to memory, with no intervention by the CPU.
there are always special purpose processors next to the single main processor (general purpose processor) for eg : the keyboeard’s microprocessor that translate each char to its ascii
multiprocessor systems (also known as parallel systems or multicore systems)
graceful degradation: fault tolerant which means that the pc has to distribute tasks among the rest of the cores if one of them failed
The multiple-processor systems in use today are of two types:
-
asymmetric multiprocessing: the boss processor gives commands and tasks to other processors , can be implemented using hardware or software
-
symmetric multiprocessing (SMP) : means each processor performs a different task
UMA uniform memory access : the situation in which access to any RAM from any CPU takes the same amount of time.
NUMA: some parts of memory may take longer to access than other parts
multiple cores are faster and less power consuming than multiple CPU chips because on-chip communication is faster than between-chip communication.
Each core has its own regs and (not all designs )( own cache memory)
Multicore CPUs appear to the operating system as processors.
clustering : nafs 7war el distributed systems en kaza computer aw server mtwsl bb3dhom bLAN wel app el wahed byt2sm eno yrun 3lehom kolhom Clustering: means one app is devided into tasks that run on different LAN connected servers
asymmetric clusters: one server is in stand-by mode and monitors the rest to replace them in case something happens/ symmetric vlusters: they’re all monitoring each other
clusters give very high computational power
Parallelization : divides a program into separate components that run in parallel on individual cores in a computer, it can be implemented using hardware or software.
storage-area networks (SANs) allow many systems to attach to a pool of storage. provides access to consolidated, block-level data storage.
In time-sharing {multiprogramming} systems: the CPU executes multiple jobs by switching among them
software-generated interrupt is caused either by an error (division by zero or invalid memory access) or by a syscall .
user mode (mode bit = 1) kernel mode( mode bit =0) that tells the os whether i’m in the userdefined code or the os code
CPUs that support virtualization has a user mode, a kernel mode and another mode kman that has its own bit set whenever there’s a VM running because it needs more privileges than user mode and less than the kernel mode.
Intel 64 family of CPUs supports four privilege levels (rings) and supports virtualization but does not have a separate mode for virtualization.
MS-DOS was written for the Intel 8088 architecture which has no mode bit. A user program can wipe out the operating system by writing over it with data.
if a program gets stuck in an infinite loop A timer can be set to interrupt the computer after a specified period. control transfers automatically to the operating system after that time
consider a process to be a job or a time-shared program
When a process terminates, the operating system will reclaim any reusable resources. Multithreaded programs have one eip afor each thread
Firmware == bios == bootsrap program: resides in ROM : first prog to execute when a computer boots. initializes the hardware ( regs and memory ) loads the os and the kernel into memory and waits for an event
BIOS (basic i/o system) is the software that resides in rom firmware used to be called bios , now it’s called uefi or efi.
network cards , ssds , video cards all have firmware
changes made to the bios are stored in the cmos chip
uefi has a feature called secure boot that restricts any unsigned drivers from booting and protects the computer from rootkits
cache coherency : means updating every cache as long as the value i want to change in still in use
we need VRAM bc main memory is too small and volatile
tertiary-storage any removable media like usbs disks CDs theyre usually slower
when the cpu needs data it first checks the cache , if it’s unable to find it there it stores it there. chache memory has an instruction cache that hhols the next instruction. without it the cpu would wait several cycles to fetch the instruction from RAM
registers are controlled by the compiler
cache by the hardware ram, ssd, disks by OS
singly linked list: each item points to its successor doubly linked list: either to its predecessor or to its successor
bitmap : binay string where every bit represents a state
every disk drive is divided into several thousand individual units, called disk blocks
when emulating a different CPU evey instruction has its own function that gets executed on the actual CPU thats why its slower
Interpretation is a form of emulation, emulating not another CPU but a theoretical virtual machine on which that language could run natively (python and java)
iOS is open-source kernel, closed-source components Darwin, the core kernel component of Mac OS X,is based on BSD
BSD is a ‘unix-like’ complete OS, with its own kernel and its own userland (no linux kernel nor GNU). GNU/Linux and *BSD family (FreeBSD, OpenBSD and NetBSD) are ‘unix-like’ OS, they behave like Unix.
the gnu project owner never released an open source kernel, linus trovalds is the one who published the kernel
a LiveCD–an OS thats boots and run from a CD-ROM without being installed on a system’s boot disk
kernel mode:
- Certain instructions could be executed
- hardware devices could only be accessed
run-time support system:(a set of functions built into libraries included with a compiler)
A running program needs to be able to halt its execution either normally (end()) or abnormally (abort()).
Message passing vs shared memory
msg passing : if the client program wants to access a file The client program and service (file system in this case) never interact directly.they communicate by exchanging messages with the microkernel.
Match microkernel: translates sys calls to msgs and passes them between the microkernel and the userland
loadable kernel modules: for example, we might build CPU scheduling and memory management algorithms (core services) directly into the kernel and then add support for different file systems (dynamically) by way of loadable modules
android is based on linux but google tweaked it.
Memory was referred to as the “core” in the early days of computing. (core dump)
“ISO” image which is a file in the format of a CD-ROM or DVD-ROM.
computers dont store the entire os in ROM cuz everytime we need to update the os we’re gonna have to change the ROM chip, instead they use EEPROM
GRUB is an example of an open-source bootstrap program for Linux systems.
A disk that has a boot partition is called a boot disk or system disk.
job is an old name for process
process states : Ready: ready for the CPU. Waiting: for the i/o operation to complete
pcb: process control block has all the info about a certain process like the proc state, regs, list of open files and info about each thread.
QUEUES:
job queue : all the processes in the system ready queue: processes that are in ram and ready to execute in the CPU device queue: w8ing for a particular device. every device has a queue i/o queue: w8ing to access a specific i/o device
short-term scheduler ==CPU scheduler long term scheduler== job scheduler = loads proccesses into memory (ram scheduler) medium term scheduler: handles swapped out proccesses (disks scheduler)
CPU scheduler:selects from among the processes that are ready to execute and allocates the CPU to one of them
interrupts cause the operating system to change a CPU from its current task and to run a kernel routine
 context switching: means taking a screenshot of the process and storing it in the PCB, switch to another process and then back again. aka suspend and then resume.
context switching: means taking a screenshot of the process and storing it in the PCB, switch to another process and then back again. aka suspend and then resume.
PUSHAD w POPAD instructions take this screenshot
WaitForSingleObject: parent will wait for the child to complete
A process that has terminated, but whose parent has not yet called wait(),is known as azombieit means they’re there in the process table but they have already terminated (no other process is waiting for it to terminate or knows its exit status)
Once the parent callswait() the pid of the zombie child is released (free for another proc) (no longer a zombie)
if a parent did not invoke wait() and instead terminated, leaving its child processes as orphans
linux solves this by making init (elroot process pid=0) the parent of any orphaned process
IPC models: (a) Message passing. (b) Shared mem
ipc : interptocess communication
msg passing is faster because in shared mem we need to sync the cache and that takes time
compiler - assembler – loader - linker (CALL)
Chrome identifies three different types of processes: browser, renderers, and plug-ins.
browser for the ui, 1 renederer proc for each open tab and one proc for each plugin
Message passing may be either blocking or nonblocking -also known as synchronous and asynchronous
when using blocking send and recieve : the process that sends the msg pauses execution and the receiver pauses until the msg arrives.
0 capacity - no buffering :means that the msg queue cannot have any msgs waiting in it
message-passing facility in Windows is called the advanced local procedure call (ALPC) in windows
section object: is a region of shared memory associated with the channel. If the client determines that it does want to send large messages, it asks for a section object to be created
When the remote procedure call (RPC) is being invoked on a process on the same system, the RPC is handled indirectly through an ALPC
strategies for communication in clientserver systems sockets, reamote procedure calls (RPCs), and pipes.
asynchronous vs synchronous threading:
async: the parent and the child execute together
synchronous basically means that you can only execute one thread at a time so the parent waits for the child
Scheduling:any type of scheduling can be: run to completion FIFO [FCFS] first come first served] Simple tasks first [SJF] shortest job first] Complex tasks first
Round Robbin
Context switching is what happens when the cpy decides to execute sth from the ready queue
pthread join() and WaitForSingleObject() in linux and windows wait for threads to finish
thread pool: limited threads the process creates as soon as it starts and uses from them whenever it needs. -> time saving more than creating a new thread whenever it needs one
A signal is used in UNIX systems to notify a process that a particular event has occurred.
-9 If a process gets this signal it must quit immediately and will not perform any clean-up operations
windows doesnt have signals it has asynchronous procedure calls (APCs) which enables a user thread to specify a function that is to be called when the user thread receives notification of a particular event
when a new process enters the ready queue the scheduler reruns the algorithm whether sjf or fifo etc..
Round Robbin scheduling: means that when a task requests an i/o operation and finishes it. it goes back to the end of the queue
Timeslicing: maximum time allowed for a process to execute before the cpu switches to the next task in queue
every cpu or core has its own cache memory. all of them share 1 shared low level cache and 1 shared memory
Hyperthreading == chip multithreading == hardware multithreadiong: means having multiple set of regs in a cpu so its faster to context switch
a cpu can only execute one instruction per cycle
Each process has a segment of code, called a critical section, in which the process may be changing common variables, updating a table, writing a file, and so on
no two processes are allowed to execute in their critical sections at the same time.
locking is, protecting critical regions through the use of locks
a semaphore is an int the describes the available resources. each time a proc uses one the semaphore decreases by one. once it’s done the semaphore increases by one
deadlock means two processes waiting for each other
a register is accessed by the cpu via one cpu clock cycle , the memory(ram) is accessed via a transaction on the memory bus. that why we need a cache memory (closer to the cpu)
logical = virtual address = where the process thinks it is Virtual addresses refer to the virtual store viewed by the process.
physical address = generated by the cpu / actual ram addresses Physical addresses refer to hardware addresses of physical memory.
Address binding: means traslating VA (where the process thinks it is) to PA (in the RAM) using MMU’s lookup tables
We use paging so that the lookup table wont get very big. paging is deviding the ram to several blocks 4kB each
ram blocks are called frames, virtual memory block are calles pages
The lookup table redirects the MMU to the corresponding page that has the wanted physical address
Translation lookaside table: TLB resides in the cache memory. it has the virtual addresses that the mmu resolved recently
TLB hit (cache hit) means we found the address in the cache memory so the processor wont go to the ram. cache miss is the exact opposite
when the MMU desnt find what its looking for in the ram or the cache , a page fault/segmentation fault happens
swapping wont happen if there is enough ram available
fragmentation leads to storage space being “wasted”, and in that case the term also refers to the wasted space itself, the solution to this is to give each process its own non contiguous (segmentation) address space
another solution to the problem of external fragmentation is compaction: to shuffle the memory contents so as to place all free memory together in one large block
paging involves breaking RAM into fixed-sized frames and breaking VRAM(virtual memory) into blocks of the same size called pages.
every process has its own lookup table
dlls are opened only once in the actual ram, but every process thinks it’s opened in its own address space
demand paging: load pages only as they are needed. similar to swapping. we only swap pages that we need and swap them out wehen we run outta ram
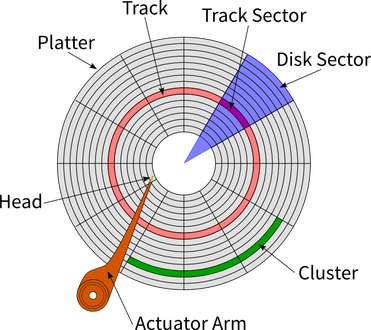
Sector == block
a track consists of -> clusters a cluster consists of -> many track sectors
The head is responssible for reading and writing to disk
the head moves between different tracks the time it takes to move between diff tracks - > seek time diff sectors -> rotational latency
A cluster is the smallest logical amount of disk space that can be allocated to hold a file
Cluster sizes range from 1 sector (512 B) to 128 sectors (64 KiB) , each cluster can hold data from only one file at any one time
Disk scheduling:
- First come first server (FCFS)
- shortest seek time first (SSF) to avoid head movement
- SCAN
- C SCAN – similar to scan but rewinds when reaches end
Mounting making the file accessable in a specific directory for users.
File attributes: name , identifier , type , location , size …
Identifier: usually a number, identifies the file within the file system; it is the non-human-readable name for the file.
if we have a text file of 11 KB, it will occupy one cluster (assuming the cluster size is 32 KB); the remaining storage size (21 KB) will stay untouched and is called slack space.

coreflood
Just another reverse engineer.